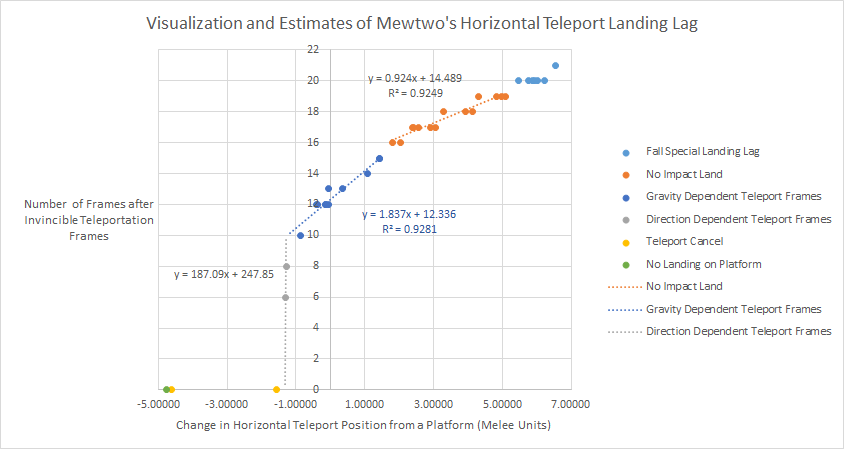
Another important teleport technique are No Impact Lands (NILs). A NIL occurs when Mewtwo’s downward velocity is low enough where there is no landing lag. NILs occur at latter frames in teleport where position calculations become more complicated
This model will be able to give Mewtwo’s position given that the frame, control stick angle at frame 5, and control stick radius at frame 5 are given.
Conic Sections
A cross-section of a cone can result in 4 different types of 2-D shapes:
Reference 1
Circle
Ellipse
Parabola
Hyperbola
Circle
Equation of a Circle is represented in Cartesian Coordinates here:
( x – h )^2 + ( y – k )^2 = r^2
where r = the radius of the circle, h = x-coordinate of the origin, and k = y-coordinate of the origin
Ellipse
Equation of an Ellipse is represented in Cartesian Coordinates here:
( x – h )^2 / a^2 + ( y – k )^2 / b^2 = 1
Reference 2
where a = semi major axis or the position that Mewtwo travels with a horizontal teleport and b = semi minor axis or the position that Mewtwo travels with a vertical teleport.
Frame 17 Model
Circle Model:
r = Mewtwo’s Position = 20.36 * R1 + 30.54
Ellipse Model:
a = ( 2 * R1 + 3 ) * ( 10 + 0.2 * n ) – 0.016 * n * (n + 1 ) * 0.5 * sec( E )
where E = the angle made with the control stick at frame 5, R1 = the radius made with the control stick at frame 5, and n = 1 (at frame 17)
Why is the ellipse model more complicated?
The ellipse model more accurately describes position at frame 17 but because a ~= b = r, we are able to use the circle model and still get accurate data. This assumption does not work at latter frames.
How do we get the x and y coordinate of Mewtwo’s position at a certain frame?
Reference 3
Mewtwo’s X Position = a * cos ( E )
Mewtwo’s Y Position = b * sin ( E )
Equation for each frame
f = current frame
Frame 7 to 16:
v = f – 6
r = ( 2 * R1 + 3 ) * v
Frame 17 to 23:
v = 16 – 6
n = f – 16
a = ( 2 * R1 + 3 ) * ( v + 0.2 * n ) – 0.016 * n * ( n + 1 ) * 0.5 * sec( E )
a = ( 2 * R1 + 3 ) * ( v + 0.2 * n + 0.2 * m + 0.2 * l ) – 0.016 * ( n * ( n + 1 ) * 0.5 + 8 * m + 8 * l + l * ( l + 1 ) * 0.5 ) * sec( E )
b = “”
k = 0.082 * 0.5 * m * ( m + 1 )
Limits of the Ellipse Model
This model falls apart when Mewtwo reaches it’s maximum downward velocity of -1.5. This is a problem because this does not occur all at the same frame and therefore is difficult to represent in the semi major and minor axis’.
Another problem is that the model is not represented by one ellipse at frame 17+ but by two different shifted ellipses. The current ‘a’ is sufficient but does not fit the status of a conic section when it is used as the semi major axis.
Conclusions
With this information, Mewtwo’s position during teleport, until a downward velocity of -1.5 is reached, should be calculable.
Edge Cancel Teleports are important because they allow Mewtwo to be able to travel large distances quickly and become actionable shortly after but require the player to use precise control stick angles. This post will focus on the controller coordinates that allow for Mewtwo to land onto a platform but will not describe when Mewtwo will reach the edge.
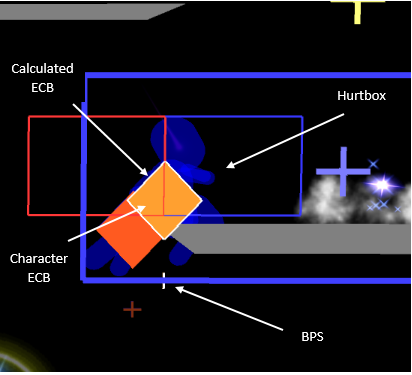
How is Landing Detected?
An Environmental Collision Box (ECB) is a diamond with 4 points that are used to calculate interaction with an object. Landing occurs when the bottom coordinate of the Calculated ECB travels past the stage.
How is Teleport Position Calculated on Frame 17?
Movement is calculated using the Base Position Star (BPS) coordinate. Position of the BPS at frame 17 is approximated by the equation:
R2 = 20.36*R1 + 30.54
where R2 =Distance traveled by Mewtwo and R1 = Radius of the Control stick recorded at frame 5.
Frame
Description
0
Up-B input
1
Teleport Animation Starts
5
Input from control stick is recorded
7-16
Intangible teleport movement
17
Landing occurs
17 + x
Edge is reached
Why is Frame 17 important?
Figure 1: Large change in position of the bottom ECB from frame 16->17
Highest X-Velocity during Teleport
Highest ECB downward Extension
First Landing Frame
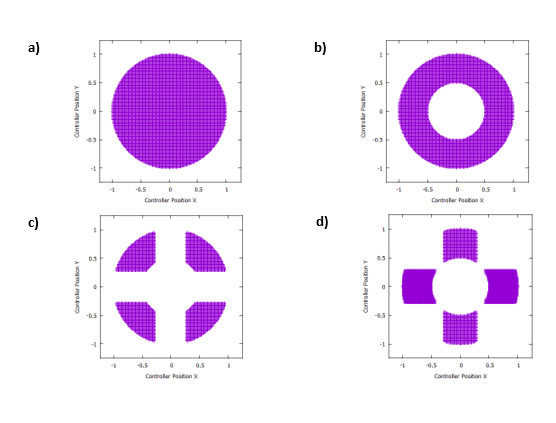
How is the Controller Position Recorded at Frame 5?
Figure 2: All the coordinates of the controller are shown in ‘a’ and extend to a radius of 1.00000. All coordinates that result in a non-default teleport are shown in ‘b’. The area of coordinates that results in a diagonal teleport are shown in ‘c’ and the coordinates that result in a horizontal or vertical teleport are shown in ‘d’.
Figure 2.b show all of the coordinates that result in a non-default teleport and encompass the coordinates that create a radius of 0.51250 to 1.00000. A buffer region of 0.27500 exists in the area perpendicular to each axis and is shown in Figure 2.d. These coordinates are redundant to the coordinates on the axis.
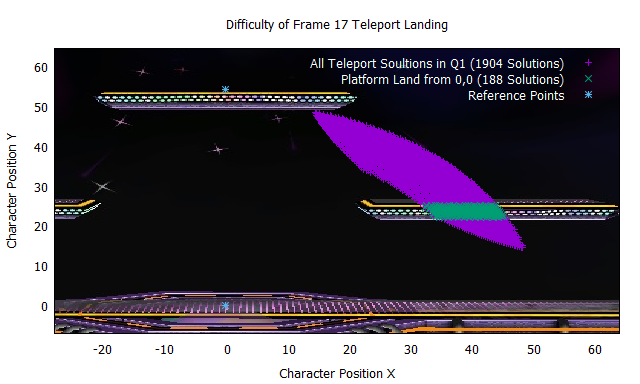
How difficult is it to Land on a Platform?
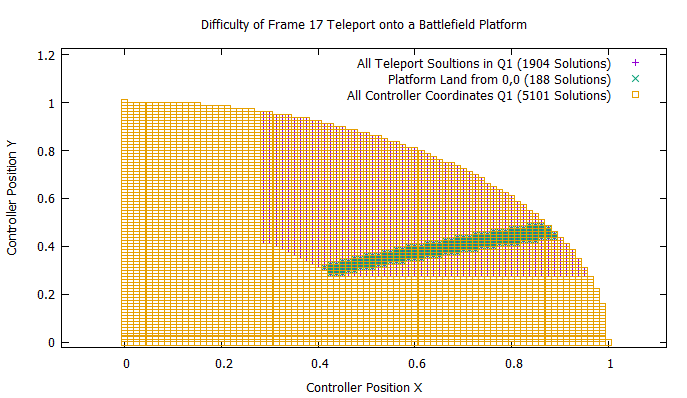
The coordinates that lie in the area where the bottom ECB coordinate extends downward are shown in Figure 3 in green. The green coordinates in Figure 4 correspond to the positions shown in green in Figure 3.
Figure 3: The two blue reference points were used to overlay the graph onto the image. The purple points show 1904 coordinates that Mewtwo teleports from Q1 of the controller. The green points show 188 coordinates that initiate landing from Quadrant 1. Figure 4: The green shows the coordinates (188 coordinates) that initiate a landing on frame 17 on the right platform from the middle of Battlefield
What if the Platform was higher/lower?
Figure 5
Diagonal teleports onto a platform are possible from a platform height range of about 17 to 54. The easiest teleport would occur onto a platform of a height around 39. Keep in mind that the higher platform landing will result in lower x-velocities and therefore the sliding distance of Mewtwo after landing.
How did I collect and plot this data?
I got my calculations and information from 20xx v4.07. I then created a Python script that goes through all of the coordinates on the controller and calculated the resulting position at frame 17. The coordinates that resided in the area of the ECB downward extension were written to a file where I then plotted them with gnuplot.
Conclusion
If you want to land onto the middle Battlefield platform from center stage, choose one of the coordinates in the blue region of Figure 4. If you want to teleport onto a platform with the most ease, teleport from a height of about 39 position units below the platform.
Every frame missed between the Ledge-Cancel and the Double Jump also increases the waiting time between Double Jump and Waveland.
It’s not Mewtwo specific, but Mewtwo’s fast aerial drift, slow falling speed and low traction all enable easy Ledge-Cancels and long Wavelands, so it’s easy for him to abuse the tech.
The tech is versatile and improves Mewtwo’s platform movement and pressure drastically if executed well, but it’s still largely unexplored.
The application with Neutral Aerial, as demonstrated in the video, leads to strong follow up options, most notably against Floaties. Follow up options include Up Tilt, which sets up further juggling, Forward Air which also sets up further juggling and Forward Tilt to knock the opponent off stage.